

来源:东北通信科技最前沿
随着人工智能的持续发展,应用场景持续拓展,各行各业都在发生巨大转变。传统制造业与人工智能所结合的产物便是机器人,机器人作为执行机构在工业化中已得到广泛的应用,但在通信手段仍然面临着众多挑战,主要困难在于如何确保机器人通信的稳定性、安全性、协调性。
稳定性、安全性方面,相比于传统常规通信,人工智能应用场景下对于通信手段要求更高。原因:1)最为常见的传统通信应用场景包括线上观影、下载,并不会产生应用安全问题;2)人工智能应用场景下,机器离人更近,例如:自动驾驶、机器人等,通信手段一旦出现安全性问题可能会导致巨大损失。
因此,在人形机器人的应用场景下,通信协议需要满足:1)无线通信部分具备多协议兼容性;2)有线通信部分具备可拓展性、灵活性、抗干扰性等。
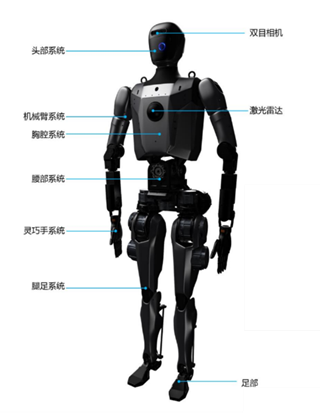
内部通讯方面,最为关键的是协调性。以人形机器人为例,基本硬件功能架构如下图所示,整个系统以模仿人类行为为目标,各个关节控制器之间实现互联,相互协调,达到有效通讯,且不能受外部影响。整套内部通讯系统类比人类的小脑——控制机体;各个环节的控制器类比人类的神经,遍布全身,并对指令进行快速响应。内部通信的高效协同,是人形机器人实现身体平衡和可操作的重要前提。
图 1:机器人基本硬件功能架构机器人
EtherCAT技术完美契合人形机器人运动控制场景应用,实现内部通信高效协同。EtherCAT是一种开放架构、基于以太网的现场总线系统,主要特点包括:1)高质量数据传输;2)分布式时钟设计,超高同步性;3)拓扑结构灵活。
1) 高质量传输:人形机器人的运动控制、传感器数据采集等都需要实时、高效的数据交互,EtherCAT可确保机器人的各个关节能够快速响应控制指令,实现流畅、精准的运动;EtherCAT还可以通过简单的措施实现线缆冗余,从而保证系统的高可用性。
2) 分布式时钟技术,超高同步性:EtherCAT采用分布式时钟技术,能够为每个从站设备提供精确的时钟同步,整个系统的抖动远小于1µs,大幅领先其他以太网通信协议,能够提供高精度的同步,满足人形机器人应用中,多个关节协同运动的需求。
3) 拓扑结构灵活:EtherCAT支持线性、树形、星形等多种拓扑结构,从而在设计人形机器人的控制系统时,可以灵活选择合适的网络拓扑,优化系统布线,提高系统的可靠性和可维护性。
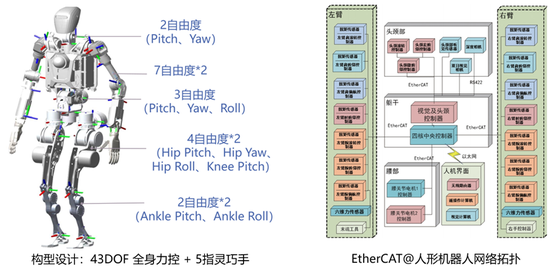
EtherCAT协议上述特点助力其在人形机器人应用场景下具备多关节同步应用、扩展性、灵活性、抗干扰性、可靠性等优势。
图 2:人形机器人构型设计需求与EtherCAT总线架构配置
外部通信方面,最为关键的是多兼容性、低时延。在实际应用场景下,机器人与充电基站、机器人与操作者、机器人与机器人之间皆要实现通信互联,这便需要机器人具备多协议兼容性。无线通信面临的另一个挑战为对传输时延要求,信号节点之间的传输时延要非常低。短距通信的主要技术包括:蓝牙、Wi-Fi、5G、星闪等。
Wi-Fi:相比蓝牙高带宽、覆盖范围广,满足机器人与云端、其他设备或用户之间的大量数据传输需求。但相比5G部署成本较低,但延时更高。
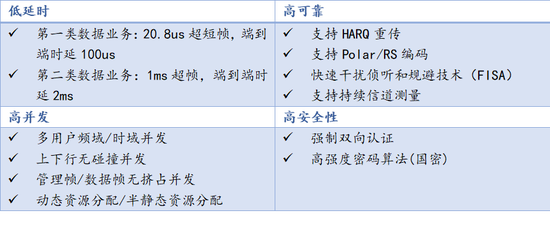
星闪:具备低延时&高可靠的特性。
表 1:星闪特点优势
















还没有评论,来说两句吧...